スピルリナ培養装置に搭載するCO2センサの通信確認中。。。
スピルリナ培養装置の開発を開始して1年が経ちました。設計が固まった部分から試作を始めています。

宇宙システム開発株式会社(SSD)に関連する各種情報をご紹介します。
この度、宇宙システム開発株式会社(以下、SSD)は、国立研究開発法人 宇宙航空研究開発機構(JAXA)の募集する国際宇宙ステーション(ISS)の「きぼう」日本実験棟の船内環境を利用する実験テーマのフィジビリティスタディテーマとして採択された、株式会社ちとせ研究所(以下、ちとせ研究所)を研究代表者とする「効率的なタンパク質生産とCO2処理を目指したスピルリナの担持体培養実証」の研究チームに加わることとなりました。本実験テーマのフィジビリティスタディ(実現可能性検討)を行うため、SSDは、これまでの研究会活動や業務経験を活かし、共同研究者として微細藻類のECLSS応用に向けた培養装置開発に取り組みます。
ちとせ研究所を含むちとせグループは、2018年より微細藻類の一種であるスピルリナの食用生産の研究をJAXAと行っており、本実験テーマは、その成果である省資源な培養システムを利用した「きぼう」日本実験棟での宇宙実験を目指します。「きぼう」日本実験棟で宇宙実験を実現させるためには、様々な制約をクリアする必要があり簡単ではありませんが、日本初の”宇宙”微細藻類培養システムの開発に向けて頑張ります!!
宇宙輸送研究会ではロケットから有人宇宙旅客機までを対象として、宇宙輸送技術の研究開発事業に対してソフトウェア技術で貢献することを目指しています。現在、主に以下の活動を実施しています。
1.スペースプレーン運用管制システムの検討
2.ロケット管制技術の習得
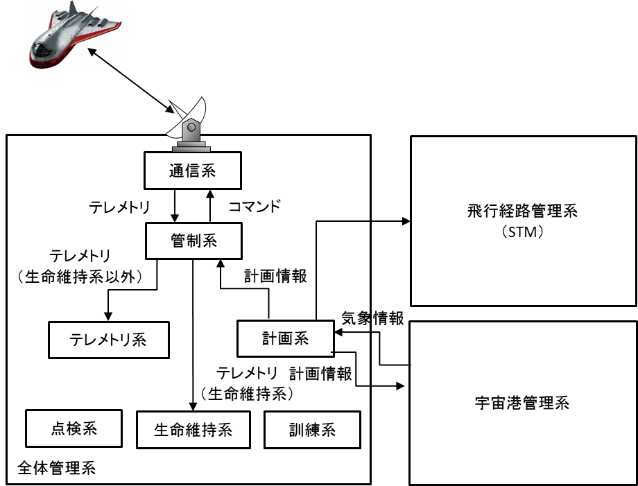
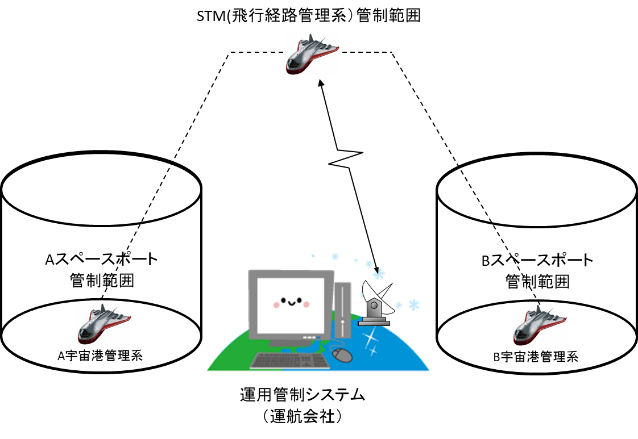
宇宙旅行を実現するためには、旅客用の有人宇宙輸送機の開発が必要となりますが、機体を問題なく運用するための管制システムも当然ながら必要となります。本研究会ではスペースプレーン用運用管制システム開発の第一歩として、既存の航空宇宙用運用管制システムを参考にしつつ、サブオービタル/オービタル、垂直/水平等におけるバリエーションを考慮して必要機能の洗い出し、考察を行っています。また、宇宙飛翔体間、既存の航空路との競合を回避するための宇宙交通管理(STM:Space Traffic Management)の動向についても調査しています。
本検討の途中経過を第62回宇宙科学技術連合講演会の宇宙旅行セッションで「スペースプレーン運用管制システムの概念検討」と題した発表を行いました。
ロケット管制技術習得の初期段階として、テレメトリ取得機能製作を目指して、トランスミッタ付き5GHzカメラ、カメラレシーバ等を購入してラジコン飛行機に搭載し、地上のPCで受信するシステムを構築しています。高度、気圧、温度、GPS等も順次搭載センサで取得し、テレメトリとして受信できるシステムとする予定です。5GHz帯の無線カメラを使用するためにアマチュア無線4級の資格も取得しました。
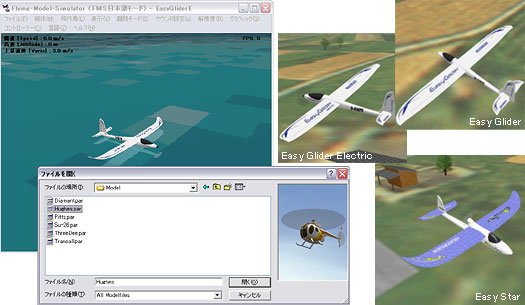
FMSフライトシミュレーターにコントローラを接続してラジコン機の操縦訓練を実施し、実際に飛行テストも行いました。また、モデルロケットを自作し、飛行テストを実施しました。


上記のテレメトリシステムを確立して、ロケットにグライダーを取り付けたブーストグライダーを製作し、能代宇宙イベントに参加することを目指しています。
第64回宇宙科学技術連合講演会(オンライン開催)にて下記の発表を行いました。
聴講して頂きました皆様、ありがとうございました。
・口頭発表:10/29 9:30~9:50 3G01 地球上及び宇宙における極限閉鎖環境の比較検討(OS14 宇宙で生きる︕ 〜宇宙居住と物質循環〜(1))
第63回宇宙科学技術連合講演会(@徳島、2019/11/6~8)にて下記の発表を行いました。
・口頭発表:11/7 9:40~10:00 2T03 深宇宙探査におけるECLSSのシミュレーションによる水再生/空気再生に関する考察
また、展示も実施いたしました。ご来場いただいた皆様、有難うございました。