8/3に秋葉原UDX4Fギャラリーで開催されたロボット工学セミナー 「強いロボット 災害現場で活躍するロボットと基盤技術」を見学して参りましたので、ご報告いたします。
このセミナーでは、自然災害や人為災害での復旧、復興するにあたり、過酷な災害現場でのロボットの活躍の話がありました。最近では福島第一原発の事故より人が立ち入ると危険である極限環境において、多くのタフロボットが投入されているそうです。その為に今後どのようなロボット技術が必要であるかを、多くの有名な研究者により紹介されました。
(1)極限災害環境で活躍するタフなロボット ~災害ロボットの研究開発の歴史と趨勢~(東北大学/田所 諭 氏)
頻発する自然災害や人為災害環境では、ロボットが情報収集・対策の切り札になります。ImPACT(革新的研究開発推進プログラム)におけるタフ・ロボティクス・チャレンジでは、人間では活動不可能な場所にて、「タフでへこたれない」というロボットの実現により、条件が悪くても失敗を何度でも繰り返しができ、ロボットが環境に適合した能力を発揮できるようにすることを目指しているそうです。
福島第一原発に投入された「Quince」が紹介されました。Quinceは、千葉工大のfuRoを中心に、NEDOと東北大学と共同で開発されたキャタピラ型ロボットです。最初に福島第一原発に投入された米IRobot社の「Packbot」では探査できなかった2階の調査をしました。本来のQuinceの目的は、NEDOよりテロ対策やガス漏れ検査のために開発されたものですが、東日本大震災を受け東京電力(以降:東電)から依頼を受けたことよりシステムが改良されました。
瓦礫の中に人が埋まっていることで、多くの大きなロボットは進入できません。そこで、瓦礫内空間探査ロボットとして、蛇型の能動スコープカメラが紹介されました。このロボットは、分布型振動移動機構を用いて自走し数センチの隙間に進入できるそうです。このロボットは駐車場建設現場倒壊事故やケルン歴史文書館倒壊事故で活躍したそうです。
(2)空から調査・救助~飛行ロボット~(千葉大学/野波 健蔵 氏)
現在ドローン業界ではDJIとParrotと3DRoboticsを中心におよそ数百件の企業があるそうです。その中でも国内でもっとも有名な企業「ミニサーベイヤー」の創立者であり、世界でのドローン開発のパイオニアである千葉大学の特別教授の野波先生は、「これまでドローンはエンターテイメントを中心であったものの、今後数年で複数の企業で重要な役割を果たすのでは」と語りました。
国産機ミニサーベイヤーの「MS-06LA」というドローンを紹介されました。日本製のこのドローンの凄いところは、オートパイロットにモデルベース制御技術を使っているところのようです。また、非GPS環境下での自律飛行であることから、GPSを利用せずに自分の位置を把握しながら自律飛行することができるみたいです。その他にも、バッテリー自動交換機能や物理モデルを用いた3Dエミュレータも装備しているようです。
現在、農林水産省では農作物関税削減により、農林水産の業界では厳しい競争にさらされているため、ドローンとIOTを活用した「スマート農業」が期待されているそうです。また、ドローンでのSLAM自律飛行による打音検査が実現できているそうです。
(3)新たなロボット機構要素 ~極限環境で動作可能な新しいロボット機構を創るためのコンセプトを生み出すには~(東北大学/多田隈 建二郎 氏)
多田隈先生は、機構を発想することが趣味だそうです。主に移動型ロボットを研究されており、大学院時代は展開式3軸惑星探査ローバーの研究されていたそうです。
研究テーマは、転倒しても動き続けることができるロボットの実現だそうです。全方向移動車輪で有名な「オムニホイール」では、段差の乗り越えや溝を乗り越えることが不可能なので、そこで球体型のオムニホイールを開発することで、課題を解決できたそうです。
上記より円形断面のキャタピラを搭載したロボットを開発したとのことです。このロボットは、普通のキャタピラ車と違い、四方八方に動けるそうです。また、この機構を3つ利用したロボットとして惑星探査ローバーをJAXAと共同研究したそうです。この機構の中身は、半球型キャタピラを2枚重ねにして車輪とモーターが覆われた状態でした。実物を持って来られましたが、調べてみるとキャタピラで覆わせることが一番苦労されたそうです。
そのほかにも、全方向駆動歯車「オムニギア」が紹介されました。2軸のギアが下でギア(ラック)として噛みついている板を全方向に移動させられるみたいです。
(4)ロボットインテリジェンス ~消える技術の実現を目指して~(京都大学/松野 文俊 氏)
生物規範型ロボットと群知能を開発されているそうです。アリの餌に群がる仕草とチームワークをロボットでどう実現させればいいのかを実験されているそうです。
ここで、群制御による集団演技の研究として、村田製作所のチアリーディングロボットやモジュラー脚型ロボットが紹介されました。
蛇型ロボットにも着手されているようです。配管の上り方や蛇の動きに関する走破性能の検証結果も紹介されました。
(5)ロボット安全と実証試験 ~基礎研究から製品化までのシームレスな安全の考え方~(長岡技術科学大学/木村 哲也 氏)
JIS規格を用いてロボットや機械の安全を保持しながらどう製作するのかが紹介されました。
以上のことから、災害時に活躍するロボットというのは、人が立ち入ると危険な環境に適応したロボットの機構や知能、規格を考慮し設計製作を行わなければならないと改めて感じました。
以上(記 奥山)





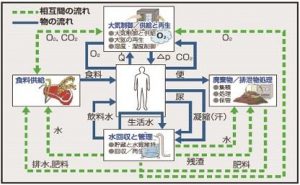 人間を中心とした自然界の物質循環サイクル
人間を中心とした自然界の物質循環サイクル