科学技術計算研究会では地球観測衛星を運用するうえでの観測計画の 立案について、数値計算シミュレーションのソフトウェアを研究開発することで、 より高度で効率的な運用ができることを目指しています。
- 軌道決定
人工衛星の軌道を計算推定するためには、衛星がいつ、どこにいたか、という 初期位置の情報が必要となります。この初期位置の情報をGPSなどの観測データから 予測する技術を軌道決定と呼び、より高度な軌道決定のための研究を進めています。
- 軌道伝搬推定
初期値を定めた後に衛星が今後いつ、どこを飛んでいくかという、未来の 軌道について予測することを軌道推定と呼びます。衛星の軌道には地球の 重力場の偏りや、大気抵抗、太陽輻射圧など、様々な要因が絡んできますので、 それらを考慮した高精度な軌道推定を目指しています。
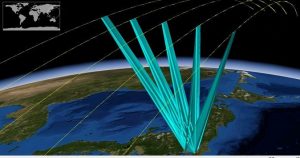
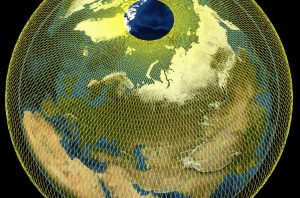 軌道推定例の軌跡
軌道推定例の軌跡 - イベント予測
推定した軌道をもとに、衛星が地上局と通信できるのはいつなのか、センサの 校正タイミングはいつなのか、など運用に関わるイベントの発生時刻を予測する 技術をイベント予測と呼び、より多くの衛星に対応した、多種類のイベントの予測を実現します。
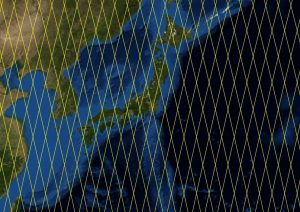
衛星軌道の直下点軌跡の例 - 最適化立案
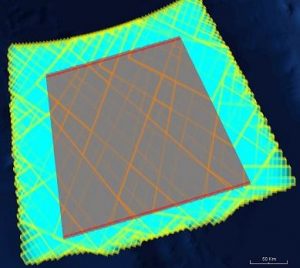
推定した軌道をもとに衛星がいつ、どこを観測できるかをシミュレーションして、 どのような観測計画を立てればもっとも効率的に多くの写真が撮影できるかを 自動で最適化するアルゴリズム技術の研究を進めています。
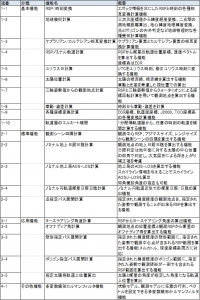
過去のライブラリ開発実績